大成建設と共同でBIMとロボットを連携した施設点検を実証
インフラ施設の老朽化や点検技術者不足を背景に、施設内設備点検の省力化が求められている中、ロボットによる施設点検の期待が高くなっているものの、実現に向けては下表のような課題があります。

| 課題項目 | 課題内容 | |
| 1 | ロボットの自律走行 | 地上走行ロボットの自律走行のために一般的なSLAM技術を用いる場合、自律走行前にロボットを手動走行させて走行環境マップを作成する必要があります。特に、同一環境で複数ロボットが共存する場合など、ロボット機種ごとにそれぞれマップ作成をする手間と時間が必要になる等の課題がありました。 |
| 2 | ロボットによる施設点検 | ロボットによる施設点検を行う際、点検を行うべき設備(管、扉、照明、等)の図面からの抽出や、点検タスクのロボットへの指示の方法等に手間がかかるという課題がありました。 |
【今回の共同実証の内容】
今回の共同実証では、イクシスの「i-Con Walker®」技術を活用し、大成建設の実運用中のオフィス環境でロボット実機を稼働させて、次のことを実証しました。
| 実証項目 | 実証内容 | |
| 1 | BIM情報を活用したロボットの自律走行 | ロボットの自律走行のため、ロボットによる事前マップ作成を行わず、竣工時図面から作成したBIM情報を活用できること。 |
| 2 | BIM情報を活用した施設内点検 | 施設内点検のため、BIM内の部材情報を活用して、ロボットの自動巡回による施設内点検ができること。 |
今回の実証を通して、BIM登録情報とロボットを連携させた施設内点検の実現性が確認できました。
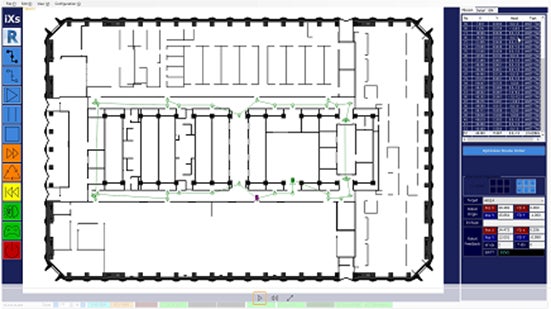 BIM登録情報を基にして自動生成された施設内設備点検経路
BIM登録情報を基にして自動生成された施設内設備点検経路
 ロボットが点検対象のドアに正対して写真撮影している様子
ロボットが点検対象のドアに正対して写真撮影している様子
 実際に撮影された写真
実際に撮影された写真
 点検後に、BIMソフトウェア上で撮影写真を確認する様子
点検後に、BIMソフトウェア上で撮影写真を確認する様子
大成建設は、IoTセンサやロボット等で集約した様々な建物内情報をBIM上で統合管理し、それらデジタルデータを建物利用者や管理者にて有効活用するためのシステムを開発中です。一方、イクシスは今後も、BIMとロボットの双方向連携技術である「i-Con Walker」を機能拡充していきます。双方の取組みを活用しつつ、イクシスは大成建設と共同で設備点検ロボットとBIMを連携させた新たなデジタルツインの実現について検討していきます。
※SLAM:
SLAMは「Simultaneous Localization and Mapping」の略称であり、ロボットの自己位置推定(Localization)と、ロボット周囲の環境地図作成(Mapping)を同時に行う技術のことです
※i-Con Walker®:
イクシスが開発したBIM/CIMとロボットの双方向連携プラットフォームです。BIM/CIM上で自動巡回ロボットの行動計画を設計し、かつ自動巡回ロボットが現場環境から取得した情報をBIM/CIM上のデータに反映するようなことを実現することができます。
https://www.ixs.co.jp/product/2509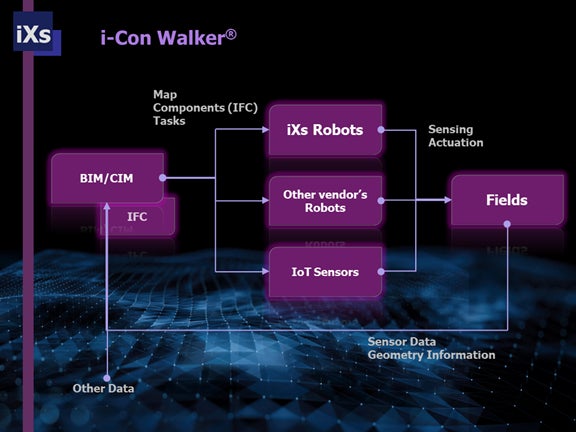 i-Con Walker®のシステム構成図
i-Con Walker®のシステム構成図
※BIM/CIM:
Building Information Modeling/ Construction Information Modeling(Management) 計画、調査、設計段階から3 次元モデルを導入することにより、その後の施工、維持管理の各段階において3 次元モデルを連携・発展させて事業全体にわたる関係者間の情報共有を容易にし、一連の建設生産・管理システムの効率化・高度化を図る取り組みです。
※デジタルツイン:
サイバー空間に現実空間をコピーし、シミュレーション予測等を行う技術
【商標】
・「i-Con Walker®」は、イクシスの登録商標です。
■株式会社イクシスの概要
イクシスは「ロボット×テクノロジーで社会を守る」をミッションとし、ロボットを利用したデータ取得・AI解析・3次元データ連携等、インフラ関連業界におけるDXを支援、そして社会課題の解決への貢献を目指しています。
|
設立 |
1998年6月 |
|
所在地 |
神奈川県川崎市幸区新川崎7-7 AIRBIC内 |
|
代表者 |
Co-CEO兼CTO山崎 文敬、 Co-CEO狩野 高志 |
|
事業内容 |
社会・産業インフラ向けロボット及び特殊環境対応型ロボット等の開発・販売 取得データのAI解析サービス、3D-Data Solutionサービスの提供 |
|
HP URL |
このプレスリリースには、メディア関係者向けの情報があります
メディアユーザー登録を行うと、企業担当者の連絡先や、イベント・記者会見の情報など様々な特記情報を閲覧できます。※内容はプレスリリースにより異なります。
すべての画像